

※この記事は、こちらのYouTube動画として公開されている、2019年10月31日のDobot User Conference 2019で招待講演した内容の草稿バージョンであり、情報はすべて当時のものです。
調理ロボットで注目を集めるConnected Roboticsの「ソフトクリームロボット」。ネット上やメーカーフェアなどでご覧になった方も多いと思います。今回の講演では、去年から開発しているこのロボットがどのように生まれたのか、Dobotを使うことにどのようなメリットがあったのかなど、開発の裏側を紹介させていただきます。
コネクテッドロボティクスの利光泰徳です。 私はロボットエンジニアとして、ソフトクリームを巻いてくれるロボット、レイタくんの開発に関わっています。
つい先日、イトーヨーカドー幕張店内のフードコートのポッポに、このレイタくんを、たこ焼きロボットのOctoChefとともに設置してきました。今日も元気に動いてくれています。開店前日のメディデーには30以上ものメディアに来ていただいて、調理のロボット化への関心の高さを実感しました。
- 日経新聞:セブン&アイ・フード、調理ロボ導入 たこ焼きとソフト担当
- PC Watch:セブン&アイ、たこ焼きとソフトクリームのロボットをフードコートで活用開始
- ロボスタ:たこ焼ロボットとソフトクリームロボットをフードコートに導入へ コネクテッドがイトーヨーカドーなど「ポッポ」に
- cnet Japan:ロボットが働くフードコート、イトーヨーカドー幕張に–たこ焼きとソフトクリーム提供
調理をロボットで革新する、コネクテッドロボティクス
私たちコネクテッドロボティクスは、「調理でロボットを革新する」をモットーに、様々な調理ロボットを開発・販売しています。ポッポに設置したたこ焼きとソフトクリームのロボットの他にも、皿洗いを自動化するロボットや、コンビニでの揚げ物を作ってくれるロボットなども開発しています。
 最近の飲食業界は、人手不足や人件費の高騰により、現場の負担が大きくなってしまっています。一方で、ロボットの価格は下がり続けています。そこで、ロボットに大変な作業を任せることで、人間たちを重労働から解放してあげることを目指しています。ロボットの得意なことと人間の得意なことは違います。たこ焼きロボットで例えると、たこ焼きの生地を流し込み、回っていないたこ焼きを検知してピックで回す、という決められた作業はロボットにはもってこいです。一方、きめ細かな接客や、お客様の要望への柔軟な対応は、人間の方が向いています。このように、ロボットを導入することで、熱い鉄板の前に立つような大変な時間を減らし、お客様へサービスを提供する時間を伸ばせると信じています。
最近の飲食業界は、人手不足や人件費の高騰により、現場の負担が大きくなってしまっています。一方で、ロボットの価格は下がり続けています。そこで、ロボットに大変な作業を任せることで、人間たちを重労働から解放してあげることを目指しています。ロボットの得意なことと人間の得意なことは違います。たこ焼きロボットで例えると、たこ焼きの生地を流し込み、回っていないたこ焼きを検知してピックで回す、という決められた作業はロボットにはもってこいです。一方、きめ細かな接客や、お客様の要望への柔軟な対応は、人間の方が向いています。このように、ロボットを導入することで、熱い鉄板の前に立つような大変な時間を減らし、お客様へサービスを提供する時間を伸ばせると信じています。
また、「作りたて」であることも重視しています。たこ焼きを一番楽に作るには、冷凍たこ焼きを解凍して提供することです。人間が作るより、そしてロボットを導入するよりはるかに楽なのですが、せっかくレストランに友達や家族と一緒に来た時、冷凍たこ焼きだと何か物足りないですよね。ロボットを導入すれば、人間たちの負担は最小限に、出来立てを提供することができます。更には、「ロボットが作った」という付加価値も付けることができると思います。
ソフトクリームロボット、レイタくん
レイタ君が働いている様子を、まだご覧になっていない方もいらっしゃると思うので、まずは動画をご覧ください。
このソフトクリームロボットは、去年の2月頃に私がコネクテッドロボティクスにジョインしてから開発をはじめました。まずはロボットでソフトクリームを巻けるか確認できないと進めないな、と思って、最初はひたすらロボットにソフトを作らせていました。まずはDobot Magicianではなくサーボモーターを使ったロボットアームで巻いてみたのですが…
ご覧の通り、速く動かすと震えてしまったり、トルクが足りないためソフトが乗るとしなってしまったりして失敗しました。そこで、オフィスにちょうどあったDobot Magicianに白羽の矢が立ったということです。まだ綺麗とは言えない巻きっぷりですが、ハードウェア的な性能は十分ありそうで、モーションを改善していくことでなんとかなりそうと判断し、Dobotでの実装を進めていきました。
弊社CEOの沢登は、Dobot Magicianのクラウドファンディング時の支援者だったので、実はそのDobot Magicianはおそらく初期ロットのものでした。ソフトクリームロボットになる前には、2017年4月にたこ焼きロボットのプロトタイプとしても使われていました。弊社は、日本でほぼ最初のDobotユーザーかもしれません。
 from https://robotstart.info/2017/04/24/startup-weekend-tokyo-robotics.html
from https://robotstart.info/2017/04/24/startup-weekend-tokyo-robotics.html
その頃は社員も4人ほどしかおらず(現在は30人以上と、大きく成長しました!)、東京農工大学のベンチャー支援施設の一室で全ての業務を行なっていました。当時、会社ではたこ焼きロボットしか開発していなかったのですが、私は新しいソフトクリームロボットの開発を任されることになりました。2月に開発を始めて、7月にはハウステンボスへの納入が決まっていたので、かなり急ピッチで開発を進める必要がありました。 綺麗に巻くために、なんどもテストする必要があったので、一時期はソフトクリームを食べまくっていました。もちろんたこ焼きロボットもあるので、たこ焼きも食べ放題な職場です。1日に最大5個くらいソフトクリームを食べていたと思います。全部捨てるのも忍びないので。 当時はソフトクリームロボットの開発はほぼ私一人だったので、ロボットを動かすプログラムを書いたり、基板を半田付けしたり、部品を印刷したり、巻くアルゴリズムを調整したりと、あらゆる作業を行なっていました。 よく「どうしてソフトクリームにしたんですか?」と聞かれるのですが、本当の理由は非常に単純で、オフィスにソフトクリームマシンとDobot Magicianがあったからです。
そしてどうにかこうにか、7月にハウステンボスに納入することができました。その時の動画がこちらです。
現在はソフトクリームロボットは、基本的な構成は残しつつ耐久性と性能をあげるべく、弊社エンジニアの北村をリーダーとして開発を続けています。 Dobotについては製品化する上で大きな問題は見つからなかったため引き続き採用し、新しい「レイタくん」というキャラクターを作ったり、ロボットを置く土台を頑丈なものにしたり、ソフトクリーム機のレバーを下げる機構を新開発したりしています。
ロボットがソフトクリームを巻くには
巻くモーションですが、毎回同じ起動、速さで動くフィードフォワード制御だと、ソフトクリームマシンの状態によってソフトが出てくる速度が異なるため、毎回の分量がずれてしまいます。
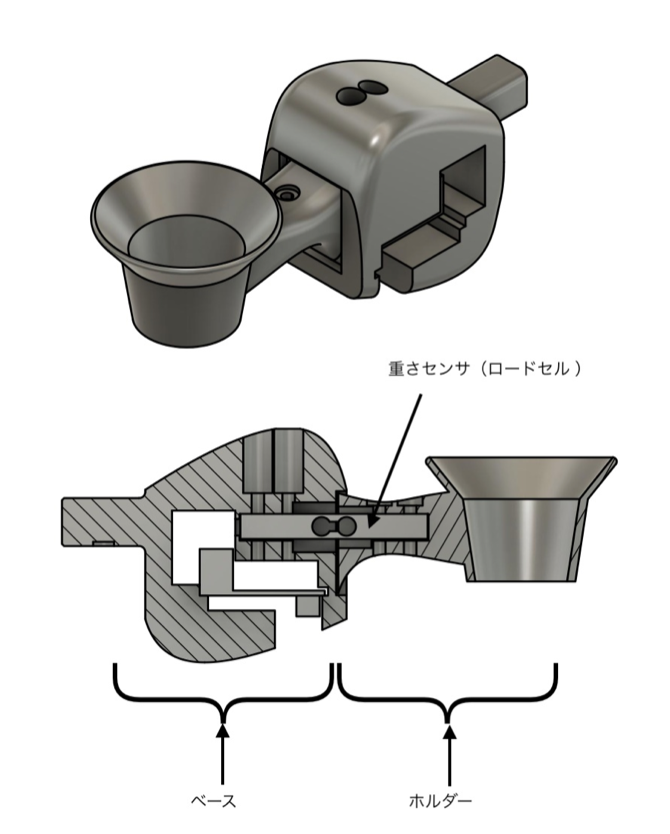
そこで、ロボットのハンドに高精度な重さセンサであるロードセルという部品を取り付けています。
アイスクリームのコーンはたった3gしかないのですが、それさえ検知できるので、「コーンが乗せられるまで待って、コーンを検知したら巻く動作を開始する」と言う振る舞いが実現できます。
そして、ソフトを巻いている間にこのロードセルからのセンサ値を並べていくと、少しずつ増えていくグラフが得られます。この図には2つの実際のデータを並べていますが、微妙に傾きが異なっていることが見えます。最小二乗法などの手法で、このデータに直線をフィッティングすると、その直線の傾きがソフトクリームの流量にだいたい対応するので、あとはそれに応じて巻く動きの速度を調整すれば、毎回適切にソフトを巻くことができます。
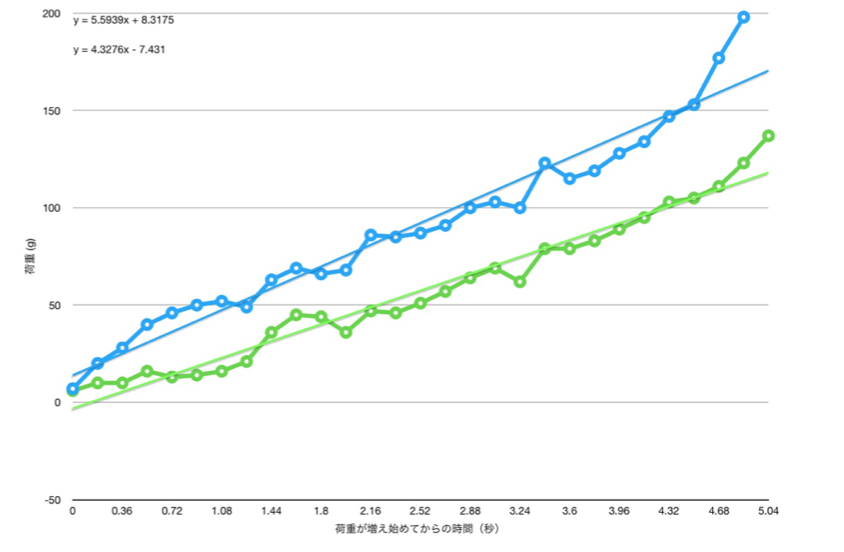
(特許第6462171号取得済)
レイタ君のライバルたち
ところで、ソフトクリームロボットはレイタ君だけではありません。非常に有名なライバルがいます。
安川電機のロボットアームを広くアピールするために生まれたソフトクリームロボット、やすかわくんです。 私もハウステンボスでやすかわくんの作ってくれたソフトクリームを食べたことがあるのですが、お金を投入すると全自動で綺麗に巻いてくれました。このロボットは2005に登場したのでかなり古参と言えると思いますが、新しいソフトクリームロボットを世に出すからにはこれを超えようとしなければいけません。同業のやすかわくんと比べてみると、Dobot Magicianを使ったからこその強みが見えてきます。 私たちが考える、レイタ君の特長はこちらです。
低価格
Dobot Magicianを採用したことで、ロボットの費用が従来のロボットアームの数十分の一で済みます。産業用に作られたロボットより壊れやすいかもしれませんが、壊れても簡単にロボットごと取り替えることができます。「高くて頑丈」から「安くて交換しやすい」ロボットへの転換だと考えています。
小型
ソフトクリームマシンの前の卓上に置くスタイルなので、やすかわくんのような大型アームのように大掛かりな設備が不要です。また、ロボットの出力が小さいので柵なども不要で、ソフトクリームを客に直接渡したりと、ロボットをより近くに置くことができます。
かわいい
ロボットが店頭に立つからには、親しみを持てる外観が重要と考えています。この記事を読んでくださっているあなたなら、ロボットがソフトクリームを作ってくれるだけで興味を持ってくれるでしょうが、実際の店舗にはあらゆる客が来ます。弊社COOの佐藤は以前、渋谷にある「変なカフェ」というロボット珈琲店の店長だったのですが、店頭に立った経験では、目新しいから面白がってくれる人がいても、なかなか購入には繋がらなかったり、そもそも素通りされてしまうことが多かったようでした。 そのため、ロボットにも接客や呼び込みをさせないといけません。レイタ君は、つぶらな瞳で「ソフトクリームはいかがですか?」と話しかけてくれます。これなら、ロボットに興味がない人でも、可愛いものが好きな人なら興味を持ってもらえます。働くだけでは足りなくて、親しみも持てるロボットを目指しています。 コネクテッドロボティクスのロボットデザイナーが設計して、3Dプリントは深センの工場でやってもらっています。
ロボット機種に依存しないCRシステム
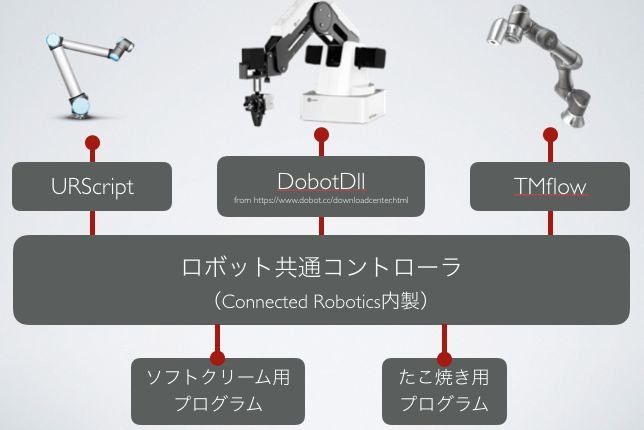 コネクテッドロボティクスの強みの一つは、ロボット共通のコントローラを作っていることです。Dobot Magicianの場合、公式ページでDobotDllというC++のライブラリが公開されていますが、これを更にラッピングして、コネクテッドロボティクス内製のコントローラーから呼び出せるようにしています。ソフトクリームロボットとしての動きはPythonで書かれていますが、それはDobotDllではなくこのコントローラを呼び出しています。
コントローラは、コネクテッドロボティクスで使っている他のロボットにも対応しているので、やろうと思えばほぼ同じプログラムで、UR3を動かすこともできます。
コネクテッドロボティクスの強みの一つは、ロボット共通のコントローラを作っていることです。Dobot Magicianの場合、公式ページでDobotDllというC++のライブラリが公開されていますが、これを更にラッピングして、コネクテッドロボティクス内製のコントローラーから呼び出せるようにしています。ソフトクリームロボットとしての動きはPythonで書かれていますが、それはDobotDllではなくこのコントローラを呼び出しています。
コントローラは、コネクテッドロボティクスで使っている他のロボットにも対応しているので、やろうと思えばほぼ同じプログラムで、UR3を動かすこともできます。
調理ロボットを作る上で、あまりロボットの機種自体に依存したくはありません。特に最近のロボット業界は興亡が激しく、新しいロボットが次々と登場したり、例えばRethink Roboticsのように人気があっても生産停止になってしまうロボットもあります。また、ロボットごとに可動域や荷重も異なるため、用途に応じて柔軟にロボットを変えられる必要があります。 もちろん、ソフトクリームロボットのロボットをDobot Magicianから変える予定は現在はないのですが、同じコントローラを使うことで、コネクテッドロボティクスのエンジニアなら誰でも扱えるので技術負債を抑えることができる、というメリットがあります。
Dobot Magicianに⚫⚫⚫が存在しない話
このようなロボットアームへの指令は通常、最終的には関節角度に変換されて送られます。そのため、普通のロボットは各関節に、エンコーダという、角度を読み取る部品がついています。Dobot Magicianにはステッピングモーターという、「今の角度からX度動かして」と角度レベルで動きを指定できるモーターが採用されているので、「最初の状態から何度動いたか」は分かりますが、最初にどんな姿勢なのか知るためには、エンコーダのような部品が必要となります。 しかし、Dobot Magicianには関節の角度を測るエンコーダはついていません。 オフィスでDobotを解剖してみた時に分かりました。 では、どのようにしてDobotは姿勢を測っているのでしょう?
答えは、慣性センサです。アームが2つに分かれていますが、それぞれに加速度センサとジャイロセンサがついていました(画像の赤い矢印の部分です)。これで重力方向が分かるので、そのセンサの傾きが分かり、ロボットの関節角度も分かります。ロボットアームといえばエンコーダは必須、と思っていたのでこれを発見した時は驚きました。
 真意は分かりませんが、これはDobotの耐久性を上げて、価格を下げるための措置の一つだと考えています。エンコーダを取り付けると、関節と一緒に動かす機構が必要なので可動部が増えます。可動部が増えるのは、磨耗したり壊れてしまうかもしれない部品が増えるということなので慎重に行わなければなりません。それよりは、静的な部品であり、エンコーダよりも概して安価な慣性センサを使って姿勢を測ろうということになったのだと想像しています。普通のロボットとは違う発想で、耐久性と低価格を追い求める合理的な設計判断だと思います。こんな所にも、Dobotとしての設計思想が垣間見えるような気がして面白いです。
真意は分かりませんが、これはDobotの耐久性を上げて、価格を下げるための措置の一つだと考えています。エンコーダを取り付けると、関節と一緒に動かす機構が必要なので可動部が増えます。可動部が増えるのは、磨耗したり壊れてしまうかもしれない部品が増えるということなので慎重に行わなければなりません。それよりは、静的な部品であり、エンコーダよりも概して安価な慣性センサを使って姿勢を測ろうということになったのだと想像しています。普通のロボットとは違う発想で、耐久性と低価格を追い求める合理的な設計判断だと思います。こんな所にも、Dobotとしての設計思想が垣間見えるような気がして面白いです。
ちなみに、重力方向に対しての傾きを測っているということは、Dobot Magicianは傾いた面では姿勢が不正確になる、ということです。使う時にはちょっと気をつけないといけませんね。
Dobot Magicianは「安い、早い、うまい」新世代のロボット
Dobot Magicianは単純なスペックで比べると、URなどのロボットアームに見劣りしてしまいます。耐荷重は小さいし、可動域も狭いです。しかし、破格の値段なため、「ふつうのロボット」だと採算が取りづらい、設置することが正当化しづらい現場にも設置できます。本格的に開発を始める前のプロトタイピングとして気軽に試せる価格帯だし、そのまま製品化できるくらいの耐久性もあります。 用途をうまく設定すれば、非常に効果的に活用できるロボットだと思います。
最初はDobot Studioという専用ソフトから動かしますが、DobotDllを使えばC++でもPythonでもJavaでも、様々な言語で動かすことが可能です。
ここ数年はArduinoなどの、誰でも気軽に開発できる安価なマイコンが登場したことでものづくりの障壁が下がり、Ardunoを使った作品や市場にでる製品も増えてきました。Dobot Magicianもそのように、「気軽に使えるしっかりとしたロボット」のスタンダードとなってきているように思います。これから先、意外な場所で見かけることにもなるでしょう。
ソフトクリームロボットがあなたの近くのお店に来るのを楽しみにしていてください。 私も、意外な場所でDobotを見られることを、期待しています。
 フランス語の試験【DELF B2】を東京の日仏学院で受験した話- 対策と当日の様子
フランス語の試験【DELF B2】を東京の日仏学院で受験した話- 対策と当日の様子
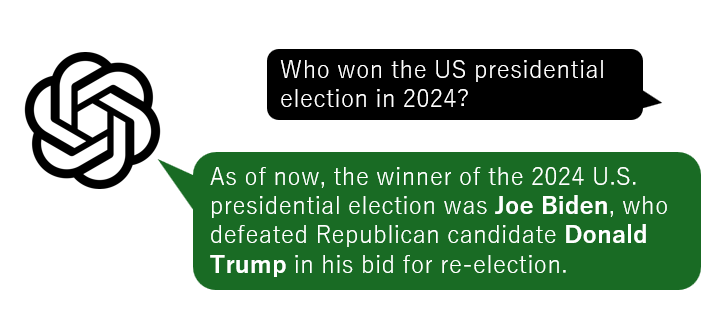 インターネットを切ったとたん、錯乱しまくるChatGPT
インターネットを切ったとたん、錯乱しまくるChatGPT
 OpenAIのロボットハッカソンで優勝した話
OpenAIのロボットハッカソンで優勝した話
 スイスで家族を呼び寄せる方法:滞在許可証申請の手順
スイスで家族を呼び寄せる方法:滞在許可証申請の手順