日本語
English

スイス・チューリッヒ工科大学のSoft Robotics Labと、ドイツ・シュトゥットガルトのマックスプランク研究所のRobotic Materials Departmentで、Robert Katzschmann教授とChristoph Keplinger教授の指導の下でロボットを研究している博士学生です。 2022年夏に博士課程を開始し、2026年末に修了予定です。 2027年以降は東京に戻り、デジタルアート関連の企業で勤務する予定です。
2020年に東京大学工学部で学士、2022年に東京大学大学院情報理工学系研究科で修士を取得しました。 これまでは主に、ワイヤ駆動ロボットなどの独自設計されたハードウェアを対象に、設計最適化や制御など、ハードとソフトの間を行き来する研究を行ってきました。便利なだけでなく、日常が少し楽しくなるようなロボットを作りたいと思っています。
2025年7月更新

Jan ~ Aug 2025
油圧ショベルに搭載可能な巨大ロボットハンドを開発し、これまでにないスケールでの器用な操作を実現しました。JSTムーンショット目標3の一環であるCAFE(Collaborative AI Field robot Everywhere)プロジェクトとして、筑波大学の永谷圭司先生が主導する研究に参加しています。現在、成果と設計プロセスをまとめた論文を準備中です。
Jul 28 2025
指導教員のRobert Katzschmann教授が登壇予定だったのですが、来日できなくなったため、代わりに私が登壇することになりました。思いがけない機会でしたが、とても光栄でした。
“From Micro-Muscles to Mega-Hands: Musculoskeletal Robotics Empowering Human Potential”というタイトルで、Soft Robotics Laboratoryの幅広い研究テーマ(生体筋、静電アクチュエータ、器用なロボットハンド操作、そして現在進めている災害対応の巨大ロボットハンドまで)を紹介しました。

9~11 May 2025
OpenAI、Mimic Robotics、Loki Roboticsがスポンサーのハッカソンで、「生成AIを活用してロボットがどう進化できるか」をテーマに開催されました。 私たちのチーム BRCKD.ai は、ユーザーが指定したキーワードに基づいてブロックを組み合わせ、モザイク作品を作るロボットを制作しました。古典的なロボット制御とAIの計画を組み合わせることで、現実世界で素早く新しいデザインを生み出せることを示し、優勝しました。

Mar 2023 ~ present
MuJoCoのMJCF(XML)で記述されたロボットモデルをURDFに変換し、ROS/RVizなどのツールで可視化・利用できるようにするために開発しました。可視化に必要な要素(リンク/慣性/メッシュ/関節)に絞ったシンプルな設計ですが、ユーザーの要望や私の必要に合わせて逐次機能を追加しています。現時点で1.5万回以上ダウンロードされています。
pip install mjcf-urdf-simple-converter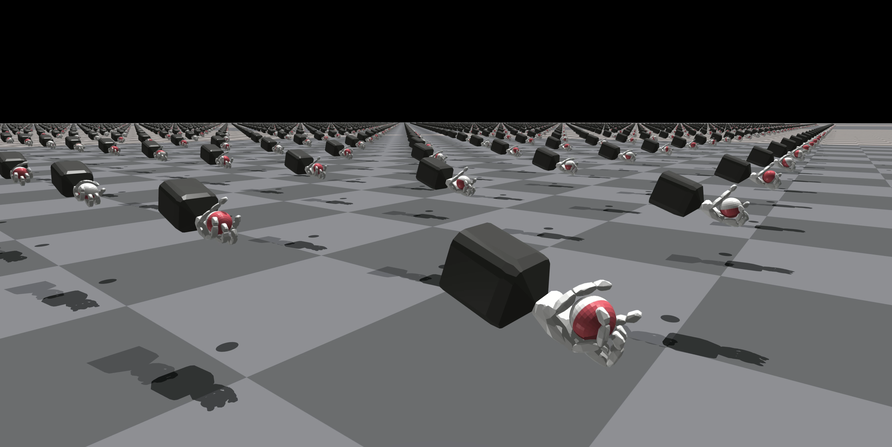
Oct 2022 ~ Sept 2023
Soft Robotics Labで開発された生体模倣ロボットハンド「Faive Hand」のために、GPUベースの並列シミュレーション環境を構築しました。数千体のロボットハンドを並列学習することで、球を手の中で回転させる方策を約1時間で学習できるようにしました。Faive HandのMJCFモデルを実装し、オープンソースのIsaacGymEnvs強化学習フレームワークで動くRL環境を構築。さらにフレームワークを再構成して、新しいロボットハンドやタスクを簡単に読み込めるようにし、faive_gymとして公開しました。これはReal World Roboticsの授業でも利用されています。
Dec 2020 ~ May 2021
修士課程(東京大学大学院在学中)の間に、チューリッヒ工科大学に新設されたSoft Robotics Labで5か月半の研究滞在を行いました。Robert Katzschmann先生の指導の下、繊維強化で半径方向の膨張を抑制し、内部に曲げ状態を計測する感覚センサーを組み込んだ空気圧ソフトロボットアーム「SoPrA」を新たに設計・製作し、その動力学挙動を記述できるモデルも開発しました。

Sep 2023 ~ Dec 2023, Sep 2025 ~ Dec 2025
Real World Roboticsは、チューリッヒ工科大学の修士課程学生向けの実践型授業で、学生チームが自分たちでロボットハンドを設計・製作し、強化学習や模倣学習による制御を実装します。私はBenedek Forraiと共同で開発したfaive_gymフレームワークを学生に紹介し、IsaacGymに自作ハンドを簡単に取り込んで器用なタスクの学習ができるようにしました。さらに、Faive Handモデルを使った導入チュートリアル動画を作成し、環境のカスタマイズからカスタムロボットの読み込みまでの流れを示しました。
授業そのものに興味がある方は、研究室のYouTubeチャンネルおよび授業サイトをご覧ください。
また、自分のロボットCADからMJCFモデルを書く方法をまとめたチュートリアル記事も公開しました。
Aug 2024
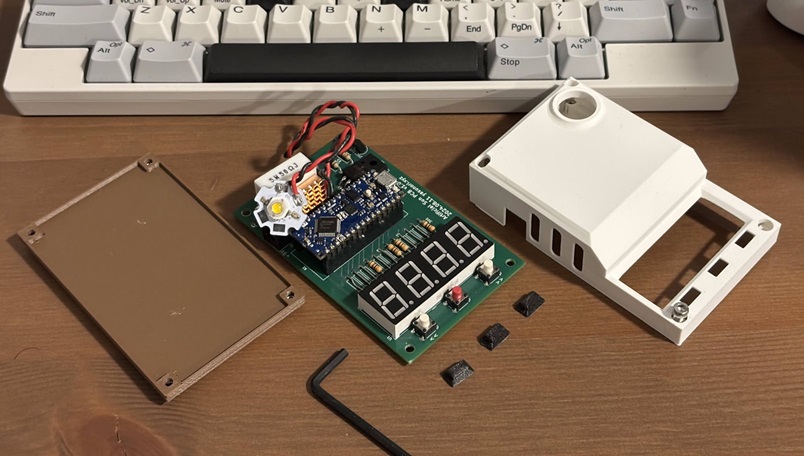
PCB基板設計を学ぶために作った、趣味のプロジェクトです。高輝度LEDで自然な日の出を再現する、小型の目覚ましデバイス。壁や天井に光を投影することで、市販品と同等の機能をより携帯しやすい形で実現しました。誰でもDIYできるようにハードウェアとソフトウェアをオープンソースとして公開しています。

Apr 2019 ~ Mar 2022
東京大学のJSKロボティクス研究室で、筋骨格ロボットの制御研究を行いました。
これらのロボットは人間の筋骨格構造を模倣しており、従来の軸駆動ロボットより自然な動きができると期待されています。
しかし制御は簡単ではなく、腕を伸ばすような単純な動作を実現するだけ無数の制御指令が考えられます。私の研究テーマは、神経科学の知見を取り入れてこれらのロボットを制御することでした。ハードウェアが人間の体に基づいて設計されているため、ソフトウェアも同様のアプローチで効果的な運動が生まれると考えています。
May 2021 ~ Mar 2022
RAMIEL(parallel wire-driven monopedal agile leg)は、準ダイレクトドライブ構成の高出力BLDCモーターを用い、精密かつパワフルな動作で自立ジャンプする単脚ロボットです。ハードウェアは鈴木天馬さんが学士論文として設計・製作しました。私は連続ホッピングと高跳躍を実現するモデルベース制御器を実装しました。制御器は1980年代のRaibertの一脚ホッパーのシンプルな制御を主に再実装したものです。

Feb 2018 ~ Aug 2018
Connected Roboticsは、ロボットによる調理の革新を目指す東京のベンチャー企業です。2018年2月から8月のインターン期間中、ソフトクリームを自動で作るロボットの新規開発を担当しました。
このロボットはソフトクリームを提供するだけでなくお客様を楽しませることも目的としているため、キャラクター性を持たせたデザインにしています。広角カメラで来客を検知し、インタラクションできるようにしました。
手先には荷重センサー(ロードセル)を搭載し、盛り付け時のらせん運動の速度を動的に調整できるようにしました。これにより、流量が変化しても毎回ほぼ同じ量のソフトクリームを提供できます(特許取得済)。
開発開始から約5か月で長崎のテーマパーク・ハウステンボスに導入されました。インターン終了後も時々関わり続け、ロボットの改良を継続しました。下の動画はハードウェア・モーション制御・ソフトウェア構成を改善した最新バージョンで、幕張のイトーヨーカドーにも導入されました(こちらは数年前に撤去されましたが、ソフトクリームロボット自体は日本各地で稼働中です)。

Oct 2019
2019年10月31日、秋葉原UDXにて開催されたTechShare株式会社、DOBOT社 主催『DOBOT User Conference 2019 ~新分野に広がる小型アーム・協働ロボットによる自動化~』にて、ソフトクリームロボットの開発担当として講演を行わせていただきました。 また、この講演の内容を元にしたブログ記事も執筆しています。
Sep 2018 ~ Jan 2019
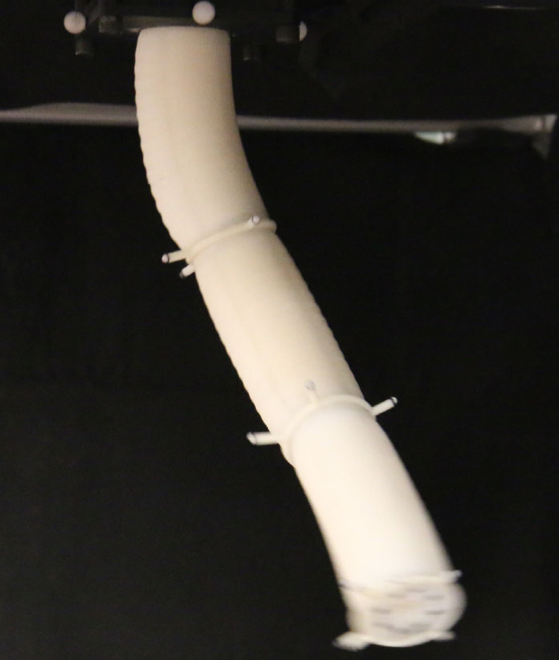
MITへの学部交換留学中に、Distributed Robotics LaboratoryでUROP(学部生のための研究機会プログラム)として、シリコン製空気圧ソフトアームの研究に参加しました。私は主に、動的制御器を実装するC++ソフトウェアの大部分を執筆し、シリコン製ロボットアームの製作にも関わり、さらにアーム形状を記述する新しいパラメータ化手法も提案しました。

Sep 2018 ~ Dec 2018
IonobotはMIT Lincoln Labとの共同開発で、2.013 Engineering Systems Designという授業の一環で、MITでの学部留学中に制作しました。電離圏のイオン化レベルの変動はGPSや無線信号の精度低下につながるため、既存の地上局では難しい観測を可能にする海上プラットフォームとして自律航行艇「Ionobot」を開発しました。機体は指定海域まで自律移動し、最大6週間にわたり自力でその場に留まりながら観測を行います。
私は電源系のチームリーダーを担当し、特に太陽電池のサイズやバッテリー重量などについて他チームと仕様を調整しながら、必要な出力と海上環境に耐えるシステム設計を行いました。太陽電池の性能評価も実験で実施しました。

Oct. 2017
学生ハッカソンJPHacks 2017で発表しました。東京大学の学生を中心に5人チームで取り組みました。
お風呂場での溺水事故を防ぐためのデバイスです。アヒル内部に加速度センサーを内蔵し、データを無線でホストPCへ送信します。人が溺れたり意識を失ったと判断すると、サーバーにアラートを送ってWeb画面を更新し、家族へ電話通知も行います。
私はハードウェア担当として、アヒルの内部の電子機器の設計製作を行いました。優秀なチームメイトたちの活躍を間近で見られて、とても楽しいプロジェクトでした。