
日本語
English
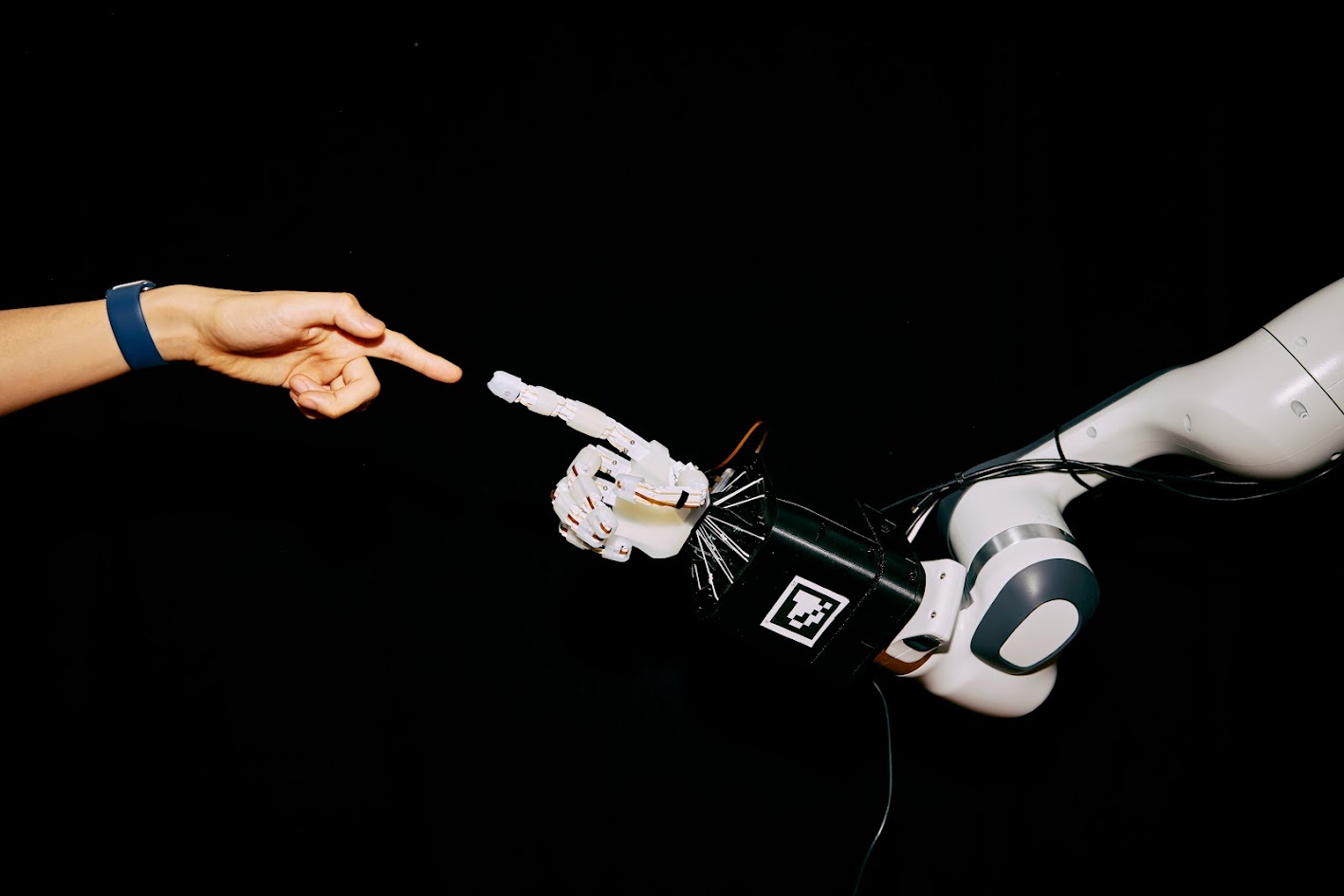
What should roboticists care about when designing / controlling tendon-driven structures, like robot hands or arms? This post covers the fundamental concept behind such mechanisms- in particular, the tendon Jacobian. Harnessing this will make the difference between a well-behaving robot that can output sufficient torque throughout the joint range, or a bad design whose output torque suddenly diminishes at random postures. There is even an interactive demo where you can “design” a simple tendon-driven joint! I believe that what I cover here should be standard knowledge for anyone designing or controlling such tendon-driven structures.
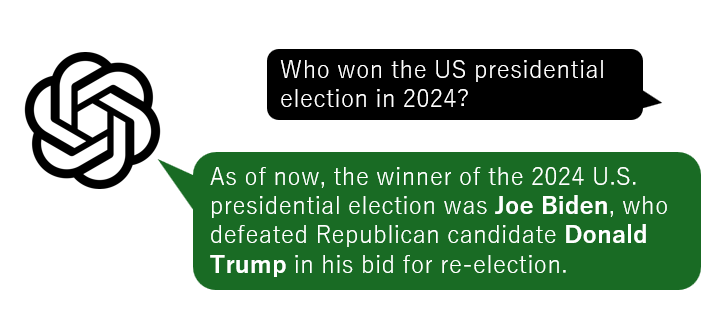
A few days ago I tried a little experiment with ChatGPT- I turned off the “Web search” feature in the personalization settings, cutting off GPT-5 from the Internet and forcing to use its own weights for all of the responses. I then asked a simple question: “Who is the president of the United States?”. What GPT-5 returned surprised me:
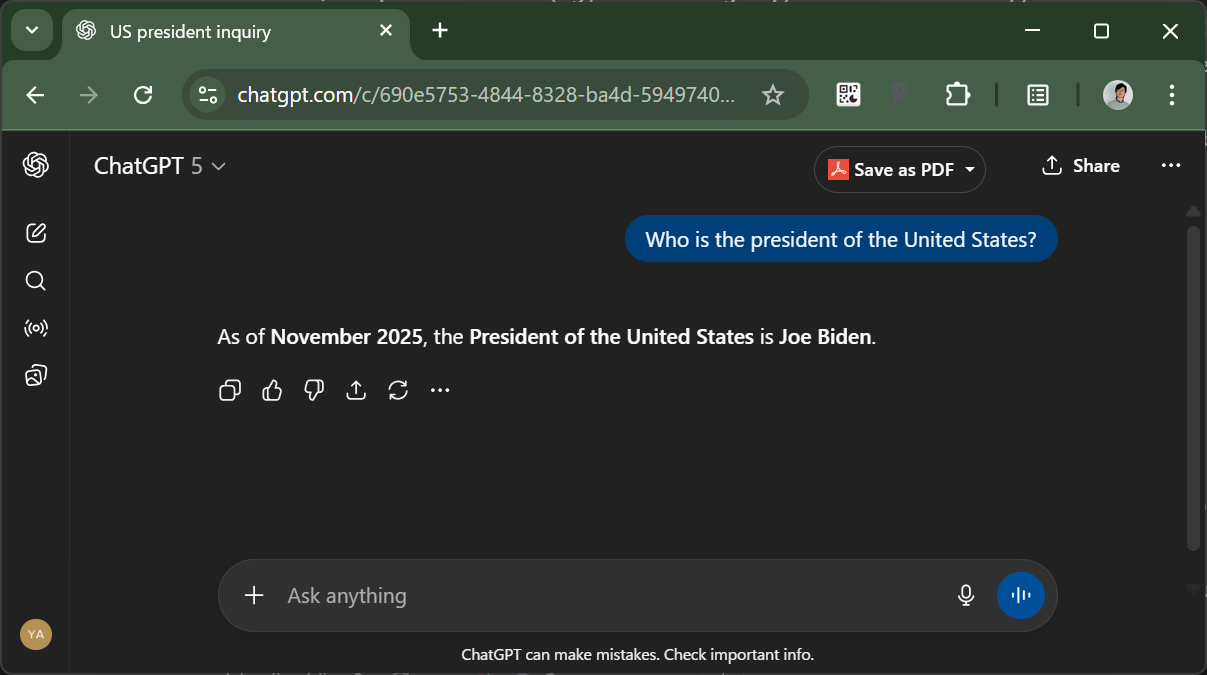
What is going on? GPT-5’s knowledge cutoff is June 2024, before the results of the 2024 presdential election came in. It’s easy to brush it off as a funny LLM quirk based on its outdated knowledge - but if you think about it, it really should know better: it should know that there will be a Presidential election in late 2024, and it also knows today’s date (from OpenAI’s sytem prompt for ChatGPT). So it should just admit that it doesn’t know. Instead, it replies with the wrong information.
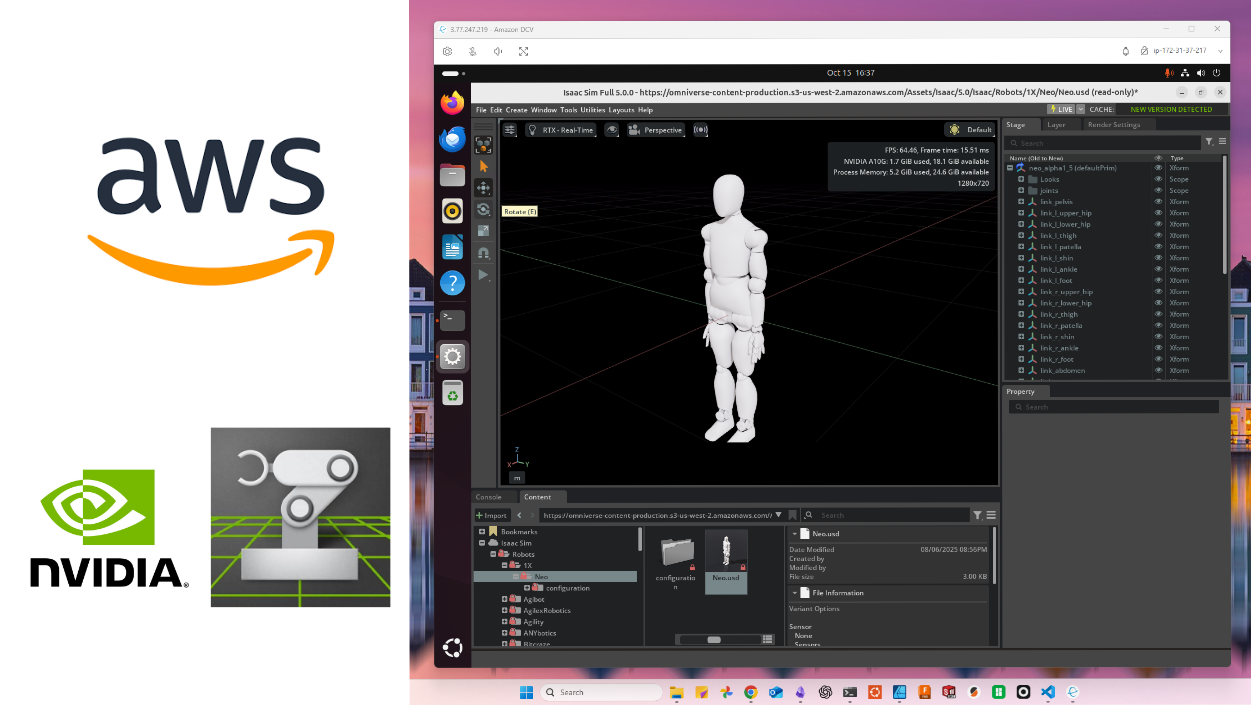
I needed to set up Isaac Sim on an AWS instance type not officially supported by the NVIDIA’s official Amazon Machine Image (AMI) NVIDIA Isaac Sim Development Workstation (Linux) for the Real World Robotics class- this is my (cleaned up) memo on how to do it.

Last month, we participated in the Mimic x Loki Robotics x OpenAI Robotics Hack held in Zurich as team BRCKD.ai, and we won with our “block-building robot.” This hackathon, sponsored by Mimic Robotics, Loki Robotics, and OpenAI, aimed to explore how robots could evolve by leveraging generative AI like large language models (LLMs). The rules for robot building were straightforward:
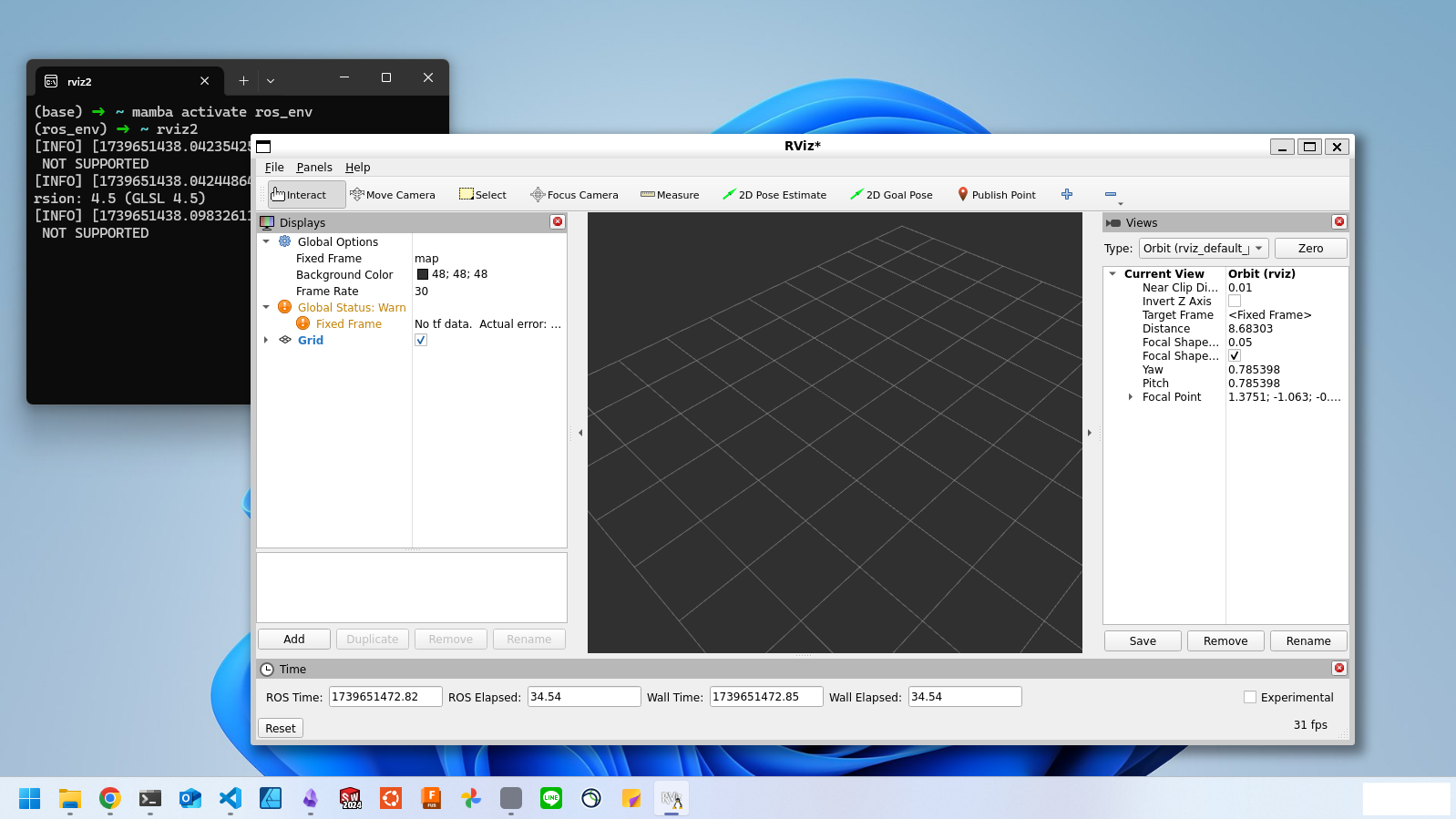
Lately, I haven’t been booting into my native Ubuntu OS very often, instead doing almost everything on Windows’ WSL. When I want to use ROS in that environment, RoboStack is very handy, which allows you to install ROS in a mamba virtual environment. For example, the usual ROS installation procedure has Ubuntu version constraints (e.g., the latest ROS 2 Jazzy is only supported on Ubuntu 24.04). However, if you’re using a virtual environment, it basically doesn’t matter which OS version you’re on. Also, by using a virtual environment, you can even run both ROS 1 and ROS 2 on the same machine. If you want to use ROS without contaminating your base environment, RoboStack is a very strong tool.

Copilot in Windows made headlines with the news that it’s the first new key to be added to PC keyboards in about 30 years. Recently, I got a new PC after three years (this time, I chose Fujitsu’s ultra-light FMV Zero) which does have a keyboard with the Copilot key. But how often will I actually use the Copilot app day to day? It’s quite iffy. At the moment, AI integration into Windows OS isn’t yet so practical, so it feels like Microsoft added the key more as a preparation for the future —and to garner attention— than anything else. In reality, I find ChatGPT more convenient than the current iteration of Copilot because it lets you choose the latest LLMs or use new features like Code Interpreter (especially if you subscribe to ChatGPT Plus). So apologies to Microsoft, but as the first thing to do after buying a new PC, let’s re-map the Copilot key to open the ChatGPT app! (Of course, if you follow the steps here, you can map the key to any other app, not just ChatGPT.)

So you’ve heard all about the cool open-source robot physics engine MuJoCo, you’ve tried out the sample robot models (e.g. in MuJoCo Menagerie), and now you want to simulate your own robot in MuJoCo- but how to do it? MuJoCo uses the MJCF XML format for its models, and also supports the URDF format. Although some converters from CAD models directly to URDF models exist, so far I’ve found it much easier to just write the MJCF model from scratch yourself. This lets you keep track of all the model parameters consistent since you write it yourself, and it’s not as complicated as you may think. So in this article I’ll explain the easiest method that I know so far to manually convert your robot model in CAD to a simulated version in MuJoCo! And at the end, I’ll also show you how to get the MJCF model to also work in IsaacGym.
This is an essay of the many missteps I took in the Real Robot Challenge, documented here to encourage myself to not repeat the same mistake in the future.

In previous article we went as far as setting up a VPN server on a Windows PC. In this article, I will explain how to connect to it from various clients and some techniques for setup and management. I split this article into two parts because it is long, but if you have not read Part 1, please read it first (especially, please read the notes first).

After much trial and error, I was able to build a VPN server that can connect from an iPhone without having to release ports or change Windows Firewall settings as described in other articles.
I will not discuss the mechanism and features of VPN because I believe that the readers of this article already have a clear purpose of using VPN communication. I think the main purposes of use are as follows.